4. 组织机构
1. 制度分析的常用方法
2 基本结构设计
3 组合机构分析与设计
4. 机构参考图例
1. 制度分析的常用方法
(1)组织自由度分析
一、常用术语的概念
(1)常用术语概念:表4-1-1、P4-3
(2)运动副的分类:表4-1-2、P4-3
2、机构运动图及操纵图
(1)如何绘制机构运动图:表4-1-3、P4-4
(2)机构动作图(图形)符号(GB/T 4460-2013):表4-1-4、P4-5
3、组织自由度分析
(1)平面机构自由度分析:P4-9
(2) 单闭环空间机构自由度计算
A.平面机构自由度分析示例:表4-1-5、P4-10
B、计算F时的注意事项:表4-1-6、P4-11
C、单闭环机构公共约束数M的确定:表4-1-7、P4-12
D、采用框架切割法确定单闭环空间机构的M:表4-1-8、P4-13
(3)多闭环空间机构和开环机构的自由度计算:P4-14
(4) 空间机构自由度计算示例:P4-14
4.平面机构的结构分析
1、平面机构的组成及结构分类:表4-1-9、P4-16
(2)平面机构运动分析
(1)平面机构运动分析方法比较:表4-1-10、P4-17
矢量图法、解析法、瞬时中心法、线图微积分法、实验法
1、机构位置及构件上某一点的轨迹分析
2、机构速度和加速度分析
(1)矢量图解法
A、矢量图形法求解机构轨迹的方法:表4-1-11、P4-18
B、矢量图形法求解机构运动的步骤和方法:表4-1-12、P4-19
C、几种常用丝杠机构的速度、加速度矢量方程:表4-1-13、P4-19
D、III、IV多杆机构速度、加速度矢量方程:表4-1-14、P4-22
(2) 分析方法
A.解析法求解机构运动的步骤和方法:表4-1-15、P4-24
(3)即刻心法
A、三种常用四杆机构运动分析公式(1杆为原始运动部件):表4-1-16、P4-25
B、III、IV类机构运动分析的分析方法:表4-1-17、P4-28
C、几种常用机构的瞬时中心位置和部件速度:表4-1-18、P4-29
3、高级副职机构变动分析
(1)使用高并行低代方法求解:P4-29
(2)利用高层机制直接求解:P4-30
(3)平面机构受力分析
1、杆组及部件惯性力静定条件计算:表4-1-19、P4-33
2、运动副摩擦力的计算:表4-1-20、P4-34
3 机构受力分析
(1)图形计算方法:表4-1-21、P4-35
(2) 用速度杠杆法求平衡力F_{p}:表4-1-22、P4-37
(3)机构动静态分析方法:表4-1-23、P4-37
4、惯性力的平衡
(1)不规则形状旋转部件平衡重力的确定:表4-1-24、P4-39
(2)平面机构平衡:表4-1-25、P4-39
(4) 单自由度机械动力学分析
1、机械的运动过程及运动方程:P4-43
2. 求解机器运动方程:P4-43
3、机器周期性速度波动的调整及飞轮设计:P4-43
A、机器运动方程:表4-1-26、P4-44
B. 运动方程应用举例:表4-1-27、P4-46
(1) 机床主轴平均角速度{m}及速度不均系数δ:P4-48
(2) 飞轮设计:P4-48
A、各类机械允许速度不均匀系数δ:表4-1-28、P4-49
B、飞轮尺寸的确定:表4-1-29、P4-50
4.机械效率的计算
(1) 传动机构不同连接方式时的总效率及特性:表4-1-30、P4-51
至 4-51
2 基本结构设计
(1)平面连杆机构
1、四杆机构结构形式:表4-2-1、P4-52
2.根据传动角度设计四杆机构
(1)按照最小传动角有最大值的条件设计曲柄摇杆机构:P4-53
(2)根据最小传动角:P4-54设计行程速比系数k=1({12}=180°)的曲柄摇杆机构
(3) 根据最小传动角取最大值的条件设计偏置曲柄滑块机构:P4-55
(4)按最小传动角设计双曲柄机构:P4-55
3、根据输入杆和输出杆的位置关系设计四杆机构。
(1)几何法
A、旋转极、等视角关系及相对旋转极:P4-56
B、采用相对极点法合成四杆机构,使输入、输出元件满足三种对应位置关系:表4-2-2、P4-57
C、采用相对极点法合成四杆机构,使输入、输出杆满足四种对应位置关系:表4-2-3、P4-58
(2) 分析方法:P4-60
(3) 实验方法:P4-63
4、根据连杆位置和连杆点位置综合铰链四杆机构。
(1) 具有三个已知连杆位置的综合铰链四杆机构:表4-2-4斜面机械效率特点斜面机械效率特点,P4-63
(2) 具有四个已知连杆位置的综合铰链四杆机构:P4-64
(3) 点曲线和圆心曲线:P4-65
(4)连杆位置已知的综合铰链四杆机构:P4-65
(5)轨迹合成:P4-67
(6) 同等机构及其应用:P4-70
(7) 直线运动机构:表4-2-5、P4-70
(2)瞬时中心线机构和互包络机构
1、瞬时中心线机构的工作特性及设计计算一般原则:P4-71
2.非圆齿轮节线设计
(1) 非圆齿轮节线设计,再现给定自变量的函数
A. 重现给定自变量函数的非圆齿轮节线设计:表 4-2-6,P4-73
B、8种典型非圆齿轮节线曲线和5种典型非圆齿轮齿条、小齿轮节线曲线计算公式:表4-2-7、P4-75
(2)共轭偏心圆齿轮和非圆齿轮:表4-2-8、P4-76
(3)椭圆-椭圆齿轮及椭圆齿轮传动
A、椭圆-椭圆齿轮及椭圆齿轮传动计算表:表4-2-9、P4-78
B、椭圆积分数值表 E=int_{0}^{Pi/2}sqrt{1-K^{2}sin^{2}}d:表 4-2-10、P4-79
3、互包络机构工作特性:P4-80
4、互信封机制设计
A、互包络机构设计计算公式(运动学法):表4-2-11、P4-81
B、互包络机构设计计算实例:表4-2-12、P4-82
(3)凸轮机构
1.凸轮机构的术语和一般设计步骤
(1)术语和符号:表4-2-13、P4-84
(2)半凸轮设计步骤:表4-2-14、P4-84
2、凸轮机构的基本型式及关闭方法
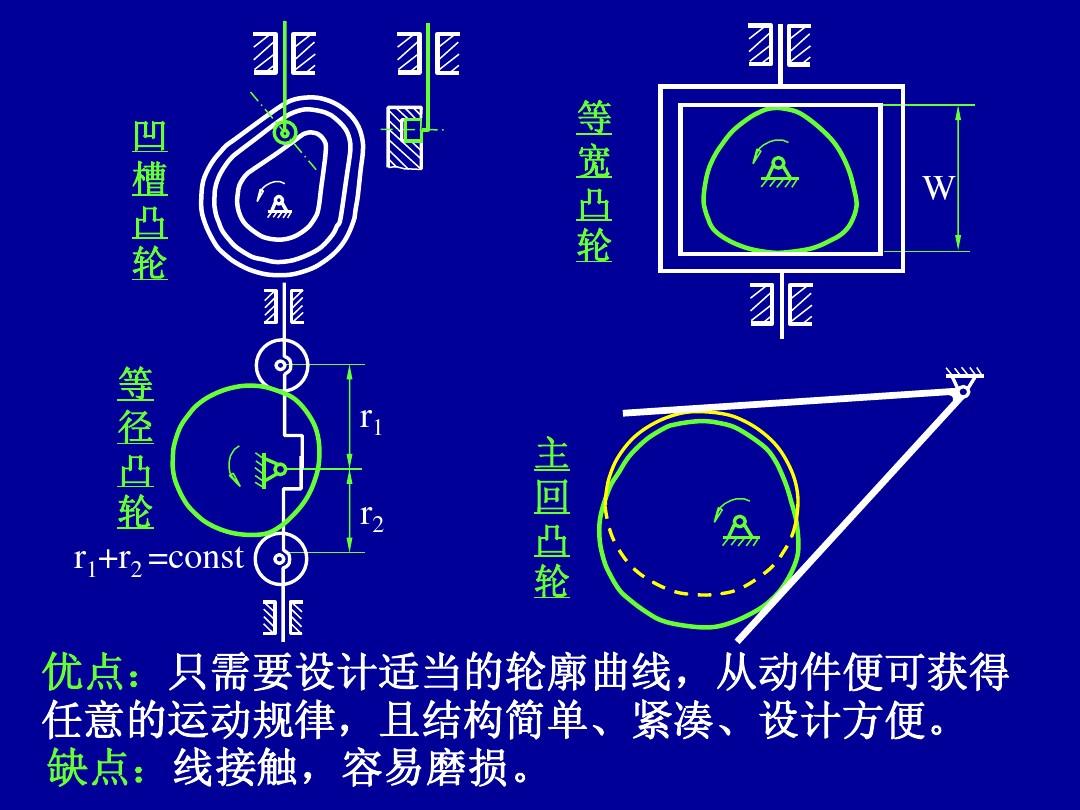
(1)凸轮机构的基本类型及特点:表4-2-15、P4-85
平面凸轮机构、空间凸轮机构、从动式
(2)凸轮机构关闭方式:表4-2-16、P4-87
3、凸轮机构压力角:表4-2-17、P4-88
4.基圆半径R_{b}、圆柱凸轮最小半径R_{min}、滚子半径R_{r}
(1)基圆半径R_{b}对凸轮机构的影响:表4-2-18、P4-89
(2)基圆半径R_{b}和R_{min}的确定方法
A、用画图法求圆盘凸轮R_{b}的一般方法:表4-2-19、P4-91
B、凸轮与轴的连接方法及R_{b}、R_{min}的计算公式:表4-2-20、P4-92
(3)滚子半径R_{r}的确定
5.从动件运动规则和方程
(1) 跟随者移动规则
A、凸轮机构各种运动模式比较:表4-2-21、P4-93
加速间断运动、Ⅰ双停运动、Ⅱ不停运动、3单停运动
(2) 基本运动规律参数曲线
A、基本运动规则参数曲线:表4-2-22、P4-95
B. 基本运动定律方程:表4-2-23、P4-96
(3)常用组合运动定律方程的应用
A、常用的组合运动规律方程及其比较和应用:表4-2-24、P4-97
B、常用多项式运动定律方程:表4-2-25、P4-101
C、非对称加速度多项式运动规律方程:表4-2-26、P4-101
D、根据指定的特殊边界条件建立多项式运动定律方程示例:表4-2-27、P4-102
E、停止、推动、返回、停止运动规律方程举例:表4-2-28、P4-102
6、滚子从动凸轮工作轮廓设计
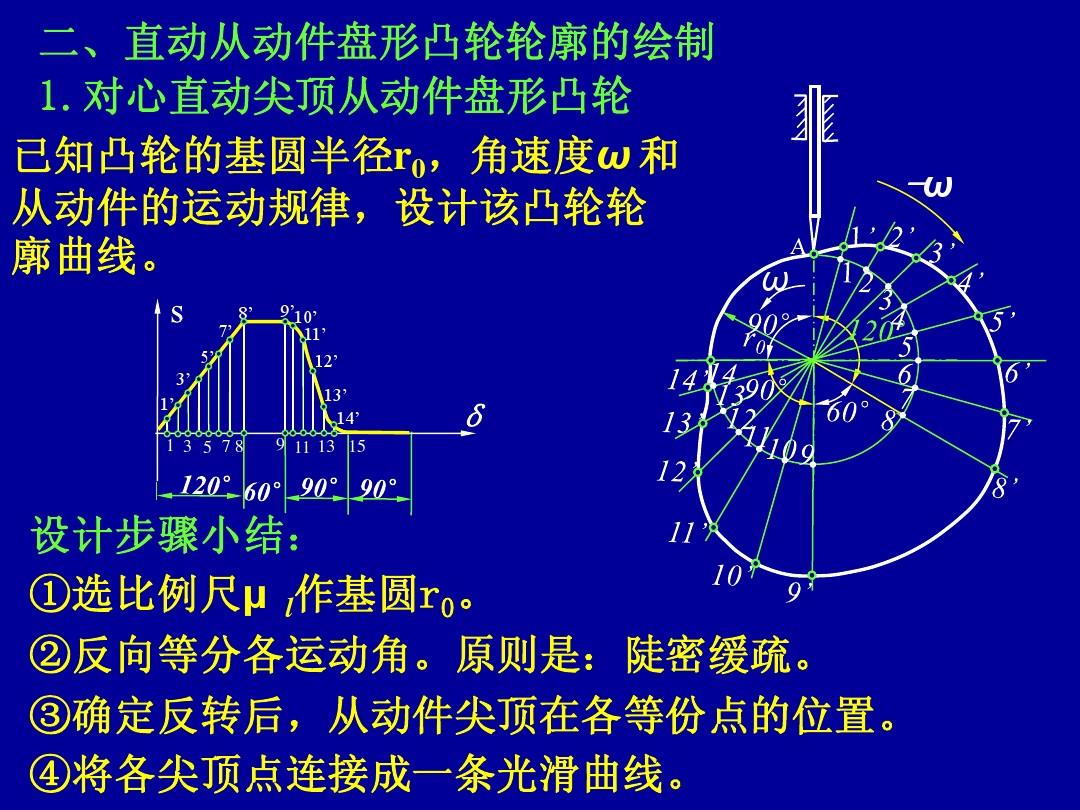
(1) 绘制方法
A、直线或摆动滚子从动件盘形凸轮工作轮廓设计:表4-2-29、P4-103
B、轴向直线及摆动从动件圆柱凸轮工作型线设计:表4-2-30、P4-104
(2) 分析方法
A、直线、摆动滚子从动件盘形凸轮工作轮廓线设计:表4-2-31、P4-105
B、共轭凸轮理论轮廓方程:表4-2-32、P4-106
7、平底从动盘凸轮工作轮廓设计
(1)直线直角平底从动盘凸轮基本尺寸的确定:表4-2-33、P4-111
(2) 固定从动件板形凸轮工作轮廓设计(绘图法):表4-2-34、P4-112
(3) 直线平底、摆动平底从动件盘形凸轮工作轮廓设计(解析法):表4-2-35、P4-113
8、圆弧凸轮工作轮廓设计
(1)单圆弧凸轮(偏心轮)
A、单圆弧凸轮及其从动件运动参数计算:表4-2-36、P4-114
(2) 多圆弧凸轮
A、定义及接弧条件:表4-2-37、P4-114
B、中心作用直线滚子和直线作用直角平底从动件的四圆弧凸轮轮廓设计:表4-2-38、P4-115
C、三角凸轮工作轮廓设计:表4-2-39、P4-116
9、凸轮、滚子结构、材质、强度、精度、表面粗糙度、加工图
(1)凸轮、滚柱结构:P4-116
A、托辊各部分尺寸参考数据:表4-2-40、P4-118
(2)常用材料
A、凸轮与从动轮接触端常用材料、热处理、极限应力{HO}:表4-2-41、P4-119
(3)强度校核及许用应力
A.强度校准公式(初始线接触):表4-2-42、P4-119
(4)凸轮精度和表面粗糙度
A、凸轮公差和表面粗糙度:表4-2-43、P4-120
(5) 凸轮工作图:P4-120
(4)分度凸轮机构
1、分度凸轮机构的性能及其运动参数
(1)几种常用间歇分度机构的性能比较:表4-2-44、P4-122
(2)分度凸轮机构中主要运动参数的符号及含义:表4-2-45、P4-122
2.圆弧面(滚齿式)分度凸轮机构
(1)基本结构及工作原理:P4-122
(2)圆弧分度凸轮机构主要运动参数及几何尺寸
A、圆弧分度凸轮机构主要运动参数及计算实例:表4-2-46、P4-124
B、圆弧分度凸轮机构主要几何尺寸及计算实例:表4-2-47、P4-126
(3)圆弧分度凸轮工作面设计及实例计算
A、圆弧分度凸轮工作轮廓的设计计算:表4-2-48、P4-127
B、凸轮与转盘对应角位置、机构角速度比、压力角计算示例:表4-2-49、P4-128
C、凸轮工作面三维坐标x_{1}、y_{1}、z_{1}计算示例(参数同表4-2-49): 表4-2-50 , P4-129
(4)圆弧分度凸轮机构动力学计算
A、圆弧分度凸轮机构主要动态参数:表4-2-51、P4-129
(5)圆弧分度凸轮机构主要零件材料、热处理及技术要求:表4-2-52、P4-131
(6)圆弧分度凸轮机构设计要点:P4-131
(7) 圆弧分度凸轮机构主要构成图示例:P4-131
(8) 圆弧凸轮分度箱
A、GJC系列圆弧凸轮分度机构安装结构尺寸:表4-2-53、P4-133
B、GT型圆弧凸轮分度机构:表4-2-54、P4-135
3. 圆柱分度凸轮机构
(一)工作原理及主要型号:P4-135
(2)圆柱分度凸轮机构主要运动参数及几何尺寸:P4-135
A、圆柱分度凸轮机构主要运动参数及计算实例:表4-2-55、P4-136
B、圆柱分度凸轮机构主要几何尺寸及计算实例:表4-2-56、P4-137
(3) 圆柱分度凸轮工作轮廓设计:表4-2-57、P4-138
(4)圆柱分度凸轮机构主要零件材料、技术要求及结构设计要点:P4-138
(5) 圆柱分度凸轮轮廓面展开为平面矩形时的设计计算:表4-2-58、P4-139
4.共轭(平行)分度凸轮机构
(1)基本结构及工作原理:P4-140
(2)共轭分度凸轮机构主要运动参数及几何尺寸
A、共轭盘分度凸轮机构主要运动参数及计算实例:表4-2-59、P4-141
B、共轭盘分度凸轮机构主要几何尺寸及算例:表4-2-60、P4-142
(3)用于用图形绘制凸轮的理论轮廓和工作轮廓
A、共轭盘形分度凸轮廓线设计绘制方法:表4-2-62、P4-144
(4)共轭盘分度凸轮机构凸轮廓线解析计算:P4-145
A、共轭盘形分度凸轮廓线设计解析方法:表4-2-63、P4-146
B、凸轮与1、3号滚子啮合的理论轮廓和工作轮廓:表4-2-64、P4-147
(5)共轭(平行)凸轮分度箱:表4-2-65、P4-147
(5)棘轮机构、沟槽机构、不完全齿轮机构、销轮机构
1. 棘轮机构
(一)常用形式
A、棘轮机构的常见形式:表4-2-66、P4-148
B、棘轮摩擦面型式:表4-2-67、P4-149
(2)设计要点:表4-2-68、P4-149
2.滑轮机构
(1)工作原理及形式:P4-150
(2)滑轮机构几何尺寸和主要运动参数计算(均匀分布径向槽)
A、外滑轮机构和内滑轮机构主要参数计算:表4-2-69、P4-152
B、滑轮机构主要参数表(均匀分布径向槽):表4-2-70、P4-154
C.滑轮机构的k和τ值:表4-2-71、P4-154
D、球面滑轮机构的几何尺寸和运动特性:表4-2-72、P4-155
(3)滑轮机构动态特性:表4-2-73、P4-155
3、齿轮机构不完整
(1)基本形式及啮合特性:P4-156
(2)设计参数计算:P4-158
A、从动轮锁紧圆弧所跨越的完整循环数K与无齿顶干涉的主动轮最终齿顶高度系数h_{am}^{*}:表4-2-74、P4-159
(3)不完全齿轮机构设计计算公式及工作图:表4-2-75、P4-161
4. 风车机构
(1)风车机构的主要类型及特点
A、针轮机构主要类型及特点:表4-2-76、P4-163
(2)风车机构设计计算
A、针轮机构几何尺寸及运动参数:表4-2-77、P4-164
(6)倾斜机构和螺旋机构
1、斜面机构的特性指标及计算公式:P4-165
(1)斜面机构的特性指标及计算公式:表4-2-78、P4-166
2、螺旋机构
(1)螺旋机构特性指标:表4-2-79、P4-168
(2)丝杠机构传动型式:表4-2-80、P4-168
3、参数选择
(1) 升程角α参考值:表4-2-81、P4-169
(7)往复式油(缸)缸机构运动设计
1. 参数计算
(1)摆动油缸计算公式:表4-2-82、P4-169
2、参数选择
(1)摆动油缸机构基本参数选择:图4-2-92、P4-171
3. 动作设计
(1)几何法:表4-2-83、P4-171
(2)分析方法:表4-2-84、P4-172
至 P4-172
3 组合机构分析与设计
(1)基本机构主要组合类型:P4-173
1.系列组合
2、并联组合
3、复杂组合
(2)凸轮连杆组合机构
1. 固定凸轮连杆组合机构:P4-174
2、移动凸轮连杆组合机构:P4-176
3、连杆凸轮连杆组合机构
(3)齿轮连杆组合机构
1、行星轮系与二级拉杆组组合机构:P4-179
A、单排内啮合行星轮系-连杆组合机构计算:表4-3-1、P4-181
2、四杆机构与行星轮系的组合:P4-182
A、几种具有停止特性的四杆铰轴轮系组合机构:表4-3-2、P4-185
3、五杆机构与齿轮机构的组合机构:P4-187
A、五连杆铰链机构与定轴齿轮系的组合:P4-187
B、五连杆铰链机构与行星轮系复合组合机构:P4-189
(4)凸轮-齿轮组合机构
1、输出部分凸轮齿轮组合机构实现周期变速运动:P4-190
2、凸轮-齿轮组合机构实现轨迹要求:P4-192
3.实现周期性停止的输出凸轮齿轮组合机构:P4-192
(5) 柔性部件组合机构
1、正时皮带连杆组合机构:P4-194
2、差速带、链节组合机构:P4-194
A、差速带、链节组合机构中各部件之间的运动学关系:表4-3-3、P4-195
至 P4-195
4. 机构参考图例
(1) 匀速旋转机构:P4-196
1、固定传动比、匀速旋转机构:P4-196
2. 分级传动机构:P4-201
3、无级变速机构:P4-203
(2)非等速旋转机构:P4-204
(3) 往复机构:P4-206
(4)紧急返回机构:P4-214
(5)行程放大机构:P4-216
(6) 可调行程机构:P4-218
(7) 间歇运动机构:P4-221
(8)超控停止及单向机构:P4-227
(9) 换向机构:P4-229
(10)差动补偿机构:P4-232
(11)气动、液压驱动机构:P4-235
(12)增力夹紧机构:P4-239
(13) 实现预期轨迹的组织:P4-244
(14)安全保险及制动装置:P4-250
(15)定位联锁机构:P4-255
(16)伸缩机构:P4-257
(17)振动机构:P4-260
至 P4-263